

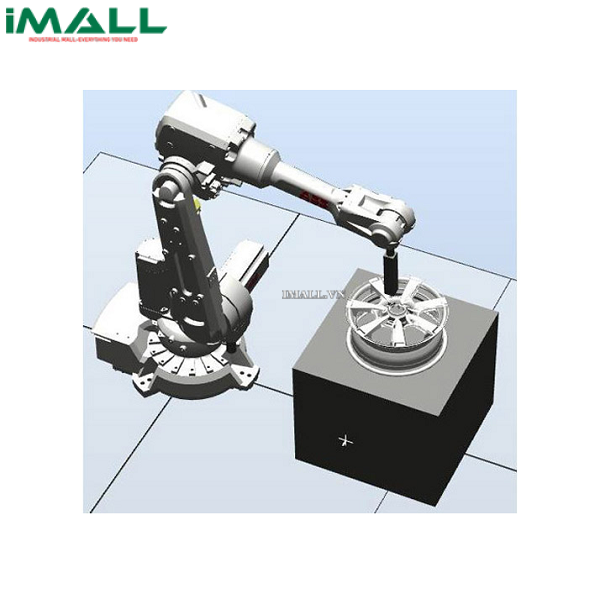
- Diện tích hoạt động: 50mm x 85mm
- Phạm vi hoạt động: cánh tay trục X / ± 90º ngang, trục Y / ± 90º dọc, trục Z / 50mm
- Chiều dài cánh tay: cánh tay X 85mm, cánh tay Y 50mm
- Tải trọng tối đa: 5 kg
- Tốc độ tối đa: X & Y 600mm / giây (tải 1 kg) 300mm / giây (tải 3 kg) 100mm / giây (tải 5 kg)
- Tốc độ tối đa cánh tay trục Z = 320mm / giây
- Độ lặp lại: X / Y ± 0,02mm trên mỗi trục, Z ± 0,02mm
- Dung lượng bộ nhớ dữ liệu: 100 chương trình, 6000 điểm
- Hệ thống truyền động: động cơ bước 2 pha
- Hệ thống hoạt động: Điểm - điểm và liên tục
- Nội suy: Nội suy tuyến tính 3D đồng thời XYZ
- Phương pháp giảng dạy: Dạy dữ liệu thủ công (MDI)
- Điều khiển: Điều khiển chuyển động trên PC
- Giao tiếp ngoài: RS232C
- Nguồn điện: 240V AC 180-250V, công suất tiêu thụ 200VA
- Nhiệt độ vận hành: 10 - 65 ° C
- Độ ẩm tương đối: 20-95% không ngưng tụ
- Trọng lượng: 22,55 lbs (10,25kg)
- THÔNG SỐ KỸ THUẬT CHUNG
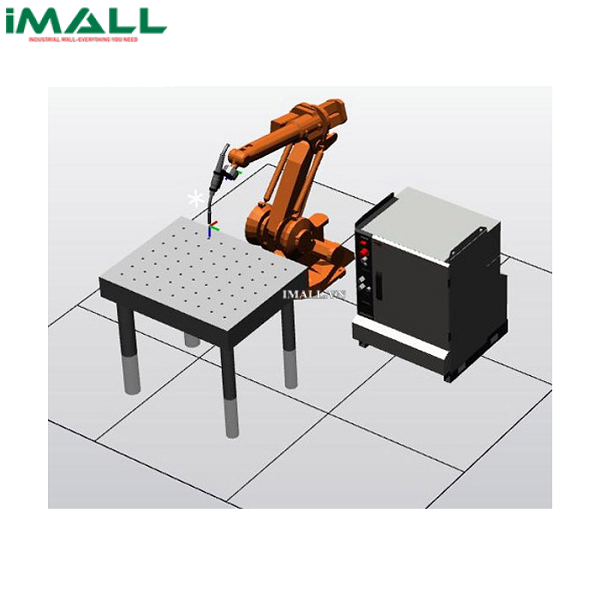
- Ứng dụng: Giáo dục, thực hành, nghiên cứu
- Cấu hình: Bảng hướng dẫn 3 trục
- Có thể điều khiển tất cả các trục đồng thời
- Điều khiển: Động cơ bước 3 PMDC với bộ điều khiển tích hợp
- Bộ điều khiển: Bộ điều khiển PC
- Hỗ trợ ngôn ngữ PC: Visual Basic & C ++
- NỘI DUNG THỰC HÀNH:
- MÀN HÌNH THỰC HÀNH PHẦN MỀM
- Các loại thí nghiệm nội suy trục đơn và tuyến tính:
- Điều khiển vị trí bằng nhiều loại cấu hình vận tốc
- Chuyển động đồng bộ nhiều trục
- Homing and pen ready routines
- Thực hành ứng dụng:
- Vẽ hình dạng hình học
- Xây dựng từ và ký tự
- Người dùng tùy chỉnh ký tự và từ
- Hộp đánh dấu thường xuyên
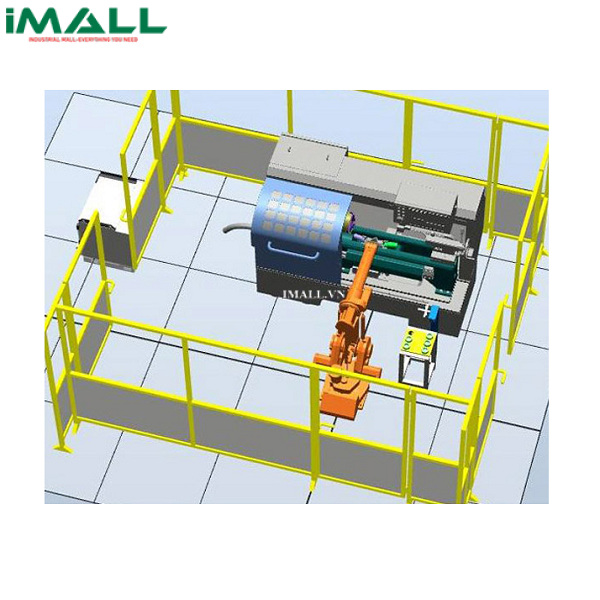
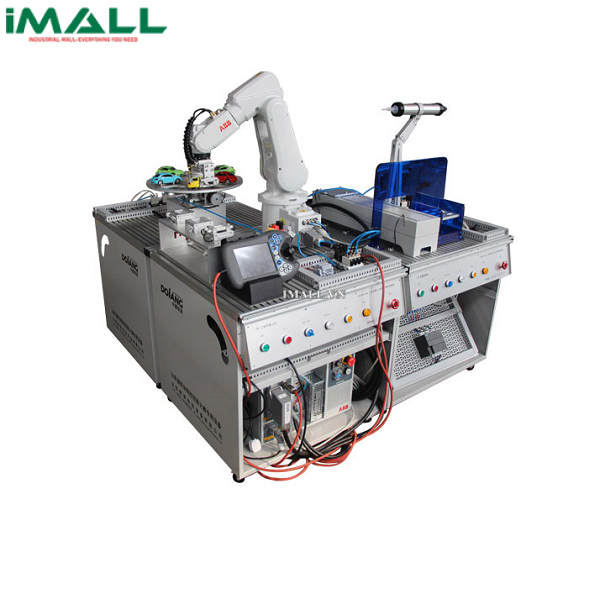
- Một hệ thống hoàn chỉnh bao gồm:
- Robot 3 trục với hành trình 85x50x50mm được lắp ráp hoàn chỉnh
- Bộ điều khiển chuyển động PCI cho PC
- Điện tử công suất được lắp ráp trong bảng điều khiển kín với nguồn điện
- Nhiều cổng I / O cho máy móc, băng tải hoặc tích hợp PLC
- Chiều dài cánh tay X = 85mm, Y = 50mm, Z = 50mm
- Cho phép tùy chỉnh vòng quay thứ cấp của các bộ phận
- Hướng dẫn sử dụng:
- Tất cả các hướng dẫn được viết bằng tiếng Anh.
- Trả lời mẫu
- Hướng dẫn giảng dạy
CÔNG TY TNHH IMALL VIỆT NAM




































Bình luận